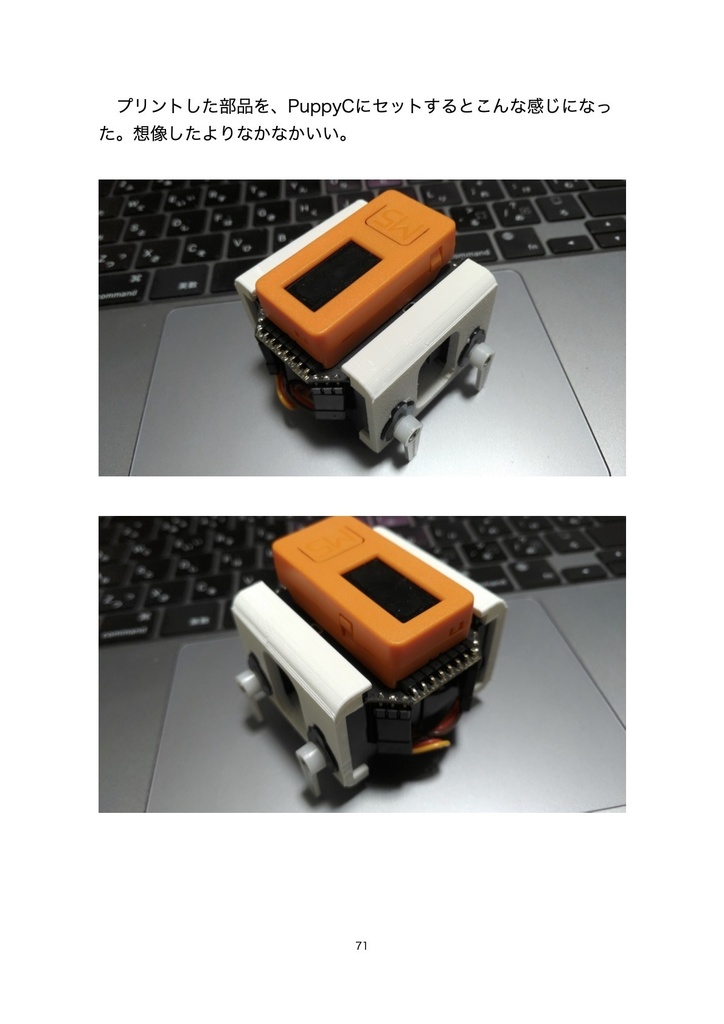
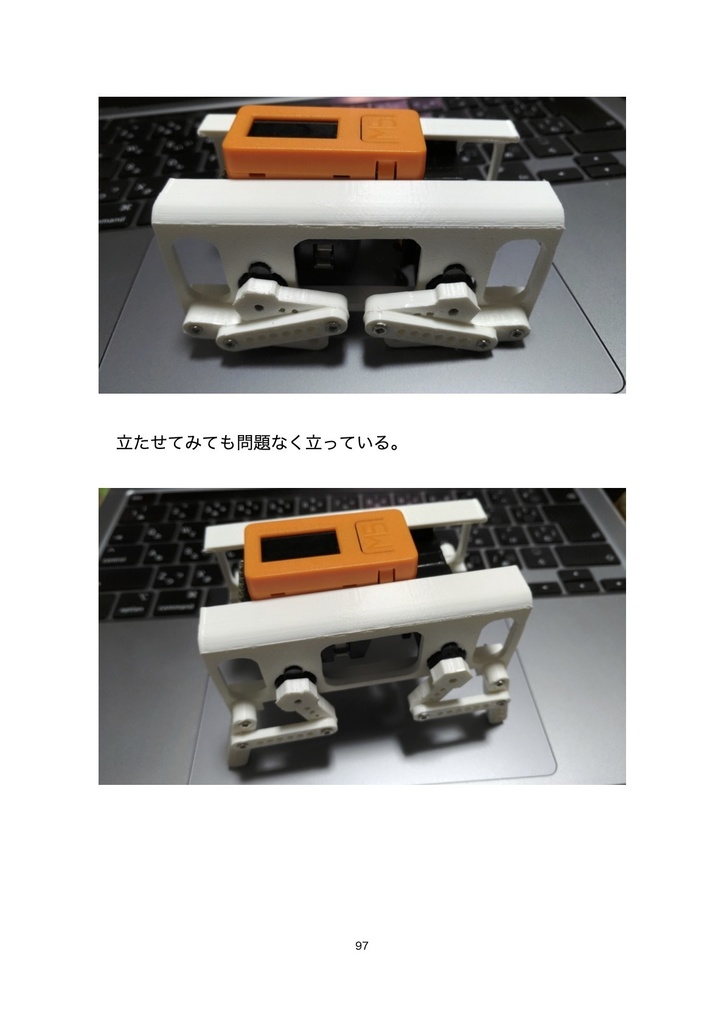
ミニマムな4足歩行ロボット M5Stack PuppyCを改造してみた
- ダウンロード商品¥ 600
M5Stack社製のPuppyCというロボットキットを使って、4速歩行ロボットを遊んでみた記録です。 技書博の見本誌提出期限が来てしまったので、未編集部分は「おまけ」として掲載しています。 v0.2: A5版, 本文164ページ, PDF 目次: ・はじめに ・ロボはやりたし、先立つものは無し 1 ・PuppyCを買ってきた 4 ・PuppyCを分解する 9 ・制御プログラムを書き込む準備 17 ・1. Arduino IDEのインストール 18 ・2. ESP32用のライブラリのインストール 21 ・3. M5StickC用のライブラリのインストール 26 ・サンプルスケッチを書き込んでみる 28 ・サンプルスケッチを改造する 36 ・シリアルからモーションを流し込んでみる 42 ・Bluetoothで無線シリアル通信してみる 50 ・ゴムバンドを排除するためにケースを作る 59 ・3Dプリンタを変更して再出力する 67 ・ケースの仕上げの微調整 73 ・PuppyCは一段落でいいかな 77 ・※ PuppyCのボディデータについて 78 ・M5StickCが充電されなくなった... 79 ・PuppyC大改造 - リンク機構で足をつける - 84 ・PuppyC大改造 - ボディを長くする - 94 ・16340充電器を注文する 100 ・M5StickC PLUSを買う 104 ̶̶- 以下は未編集のため「おまけ」です ̶̶- ・買ったばかりのM5StickC PLUSを殺した... 112 ・PowerCを買ってしまった 118 ・PuppyC大改造 - スケッチをPlus用に移植する - 124 ・PuppyC大改造 -連続モーションをSPPで送れるようにする- 132 ・PuppyCが壊れた... 143 ・M5StickC Plusから電池と磁石を取り除 く 147 ・あとがき